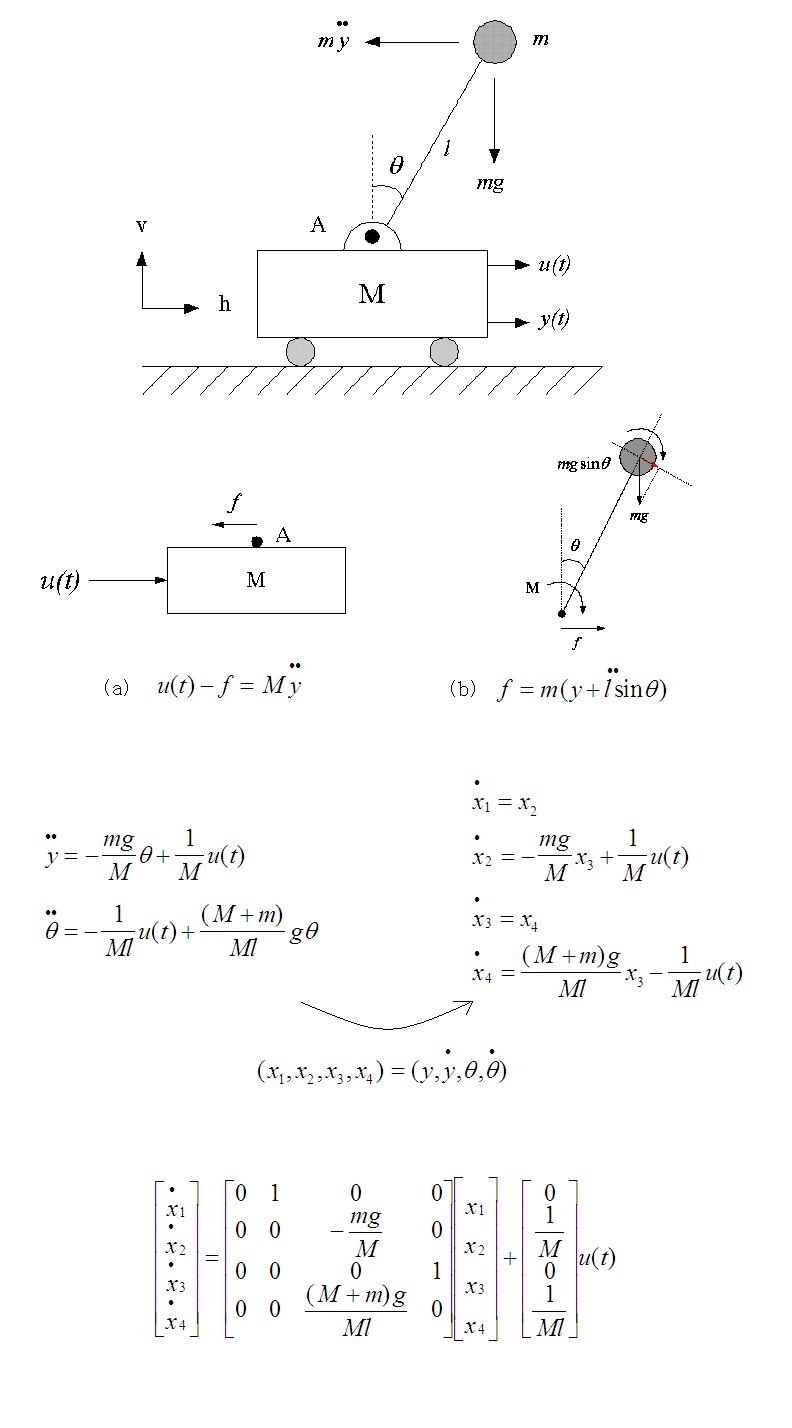
역진자모델
이족 로봇(biped robot)을 제어하기 위해서는 일반적으로 ZMP( Zero Moment Point )라는 방법을 이용하는데, Robot 의 전체 질량중심에 대한 Moment가 "0"이 되는 지점을 찾아 원하는 위치대로 제어하는 방법이다.
질량중심이 공중에 떠있는 구조가 되므로 역진자 모델이 기본적으로 ZMP 방법을 이해하기 쉬운 방법이라 하겠다. 역진자는 진자를 뒤짚어 놓은 것으로 불안정한 상태 그자체이다. 진자를 세우기 위해 필요한 수식은 아래와 같다.