MSRS
마이크로소프트에서 로봇을 쉽게 개발 할 수 있는 개발툴을 내놓았다. 이 툴의 특징은 프로그램의 경험이 없는 학생, 일반인도 사용이 가능하도록 쉬운 비주얼 언어인 Visual Programming Language (VPL)을 사용하고 있다는 것이다.
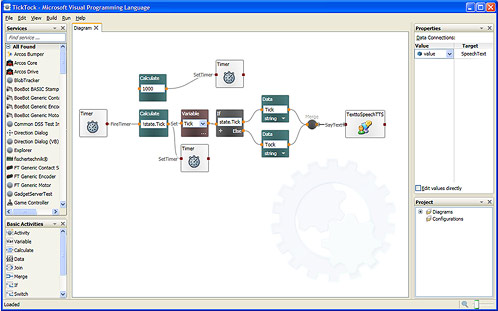 VPL은 그림과 같이 UI 상에 사용자가 연결하는 방식으로 되어 있어, 과거의 레고 마인드 스톰에서 프로그래밍하던 방식과 유사하다고 생각된다. 이러한 UI 프로그래밍 방식은 LabView라는 계측 제어 프로그램에서도 마찬가지로 사용하고 있다.
VPL은 그림과 같이 UI 상에 사용자가 연결하는 방식으로 되어 있어, 과거의 레고 마인드 스톰에서 프로그래밍하던 방식과 유사하다고 생각된다. 이러한 UI 프로그래밍 방식은 LabView라는 계측 제어 프로그램에서도 마찬가지로 사용하고 있다.
MSRS 제품의 구성은 다음과 같다.Visual Studio용 개발 환경 및 런타임 모듈
Visual Programming Language (VPL) 개발 도구
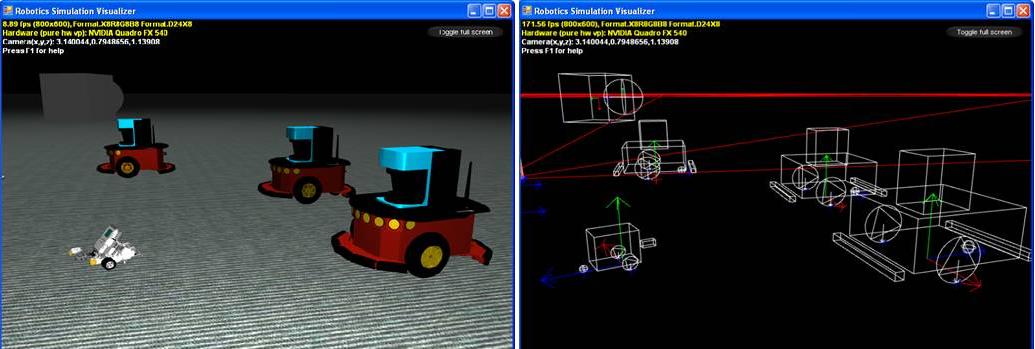
시뮬레이션 개발 환경
애플리케이션 샘플 및 튜토리얼
로봇을 이용하는 개발자에게는 좋은 툴이 될 수 있을 것으로 기대한다.
마이크로소프트에서 로봇을 쉽게 개발 할 수 있는 개발툴을 내놓았다. 이 툴의 특징은 프로그램의 경험이 없는 학생, 일반인도 사용이 가능하도록 쉬운 비주얼 언어인 Visual Programming Language (VPL)을 사용하고 있다는 것이다.
MSRS 제품의 구성은 다음과 같다.
로봇을 이용하는 개발자에게는 좋은 툴이 될 수 있을 것으로 기대한다.