혼다 P2
혼다 아시모가 만들어지기 전 모델인 P2 에 대한 논문의 내용을 발췌한 내용이다. 1998년 honda humanoid robot 에 대한 내용으로 기본적인 원리와 사양에 대해 정리되어 있다.
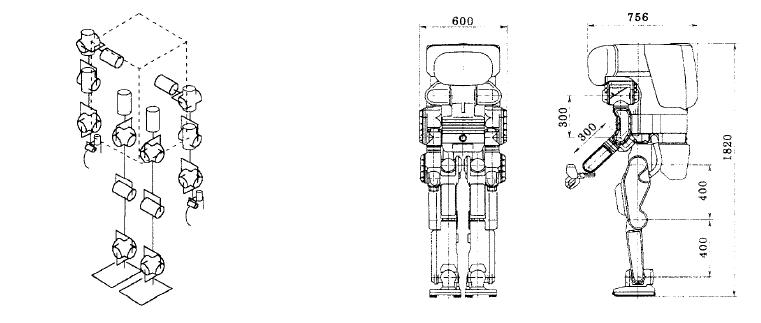
P2의 경우 총 자유도가 14를 가지는데, 자유도는 움직일 수 있는 관절의 갯수를 의미하고 동작을 위한 모터의 갯수를 결정한다. 모터는 DC 서보모터를 이용하였고 니켈아연 전지를 이용하여 무선으로 원격조종할 수 있도록 하였다.
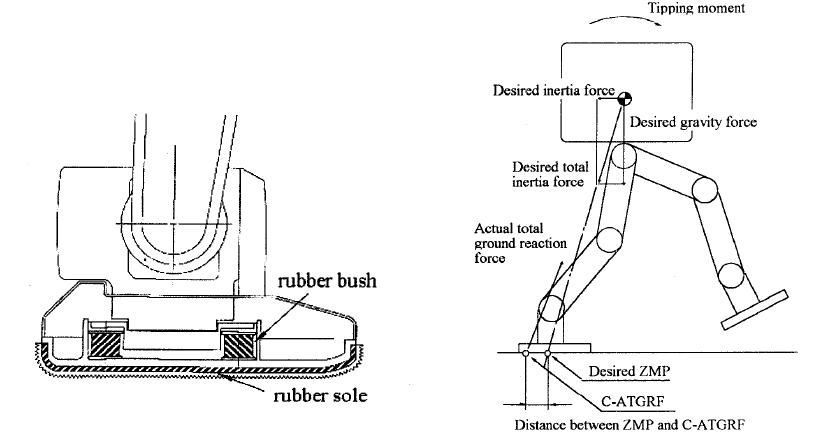
발바닥은 고무로 처리해서 충격방지를 위하도록 설계하였다. 2족 보행을 위해 ZMP (Zero Moment Point) 라는 방식을 이용하는데, 지면을 상대로 서있는 몸체의 관성모멘트가 0 이 되는 지점을 의미하는 말로 쓰러지지 않기 위해 ZMP를 찾아 제어하는 것이 핵심이다. 혼다에서는 ATGRF(Actual Total Ground Reaction Force)라는 지면에 대한 힘을 0 으로 만들기 위헤 C-ATGRF(Center of ATGRF) 라는 개념으로 정의했다.
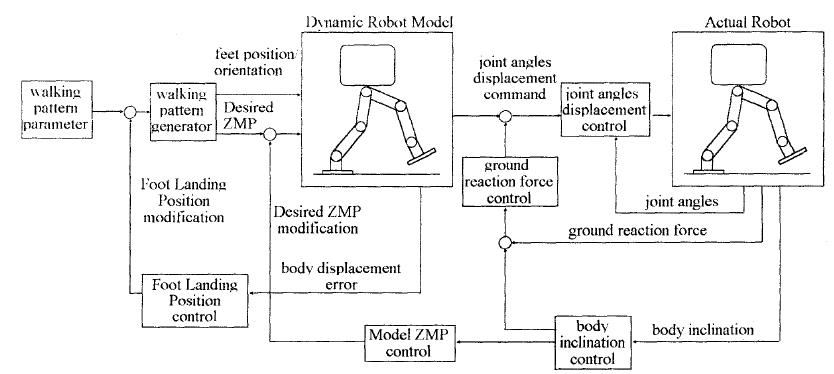
혼다의 로봇제어에서 잘 알려져 있는 방법은 ZMP를 0으로 만드는 균형을 잡는 것만 제어하는 것이 아니라, 넘어지는 방향으로 쓰러져서 속도의 보강을 가져와 보행제어를 할 수 있게 한 것이 특이한 것이라 하겠다.
혼다 아시모가 만들어지기 전 모델인 P2 에 대한 논문의 내용을 발췌한 내용이다. 1998년 honda humanoid robot 에 대한 내용으로 기본적인 원리와 사양에 대해 정리되어 있다.
P2의 경우 총 자유도가 14를 가지는데, 자유도는 움직일 수 있는 관절의 갯수를 의미하고 동작을 위한 모터의 갯수를 결정한다. 모터는 DC 서보모터를 이용하였고 니켈아연 전지를 이용하여 무선으로 원격조종할 수 있도록 하였다.
발바닥은 고무로 처리해서 충격방지를 위하도록 설계하였다. 2족 보행을 위해 ZMP (Zero Moment Point) 라는 방식을 이용하는데, 지면을 상대로 서있는 몸체의 관성모멘트가 0 이 되는 지점을 의미하는 말로 쓰러지지 않기 위해 ZMP를 찾아 제어하는 것이 핵심이다. 혼다에서는 ATGRF(Actual Total Ground Reaction Force)라는 지면에 대한 힘을 0 으로 만들기 위헤 C-ATGRF(Center of ATGRF) 라는 개념으로 정의했다.
혼다의 로봇제어에서 잘 알려져 있는 방법은 ZMP를 0으로 만드는 균형을 잡는 것만 제어하는 것이 아니라, 넘어지는 방향으로 쓰러져서 속도의 보강을 가져와 보행제어를 할 수 있게 한 것이 특이한 것이라 하겠다.

